
Wrzesień 12th, 2018
Walcarki rolkowe – 1950 - 1970
Autor Russell Barnshaws
Przed przystąpieniem do lektury niniejszego artykułu zapraszamy do przeczytania artykułu na temat historii walcowania przed 1950 rokiem.
Rolki w walcarkach miały zwykle kształt piramidy jak na Rys.2.
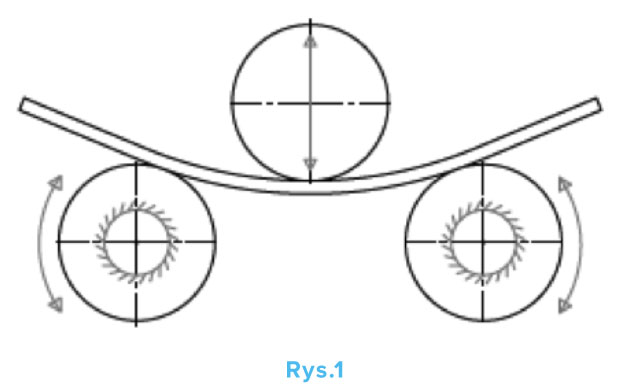
To rozwiązanie wiązało się z niewywalcowanymi końcami blachy (płaskie końce). Odcinek blachy od punktu w którym blacha dotyka rolki górnej do moment w którym blacha styka się z rolką dolną pozostawał prosty. W poprzednim artykule ‘Współczesna historia projektowania walcarek i wybór niektórych maszyn – część pierwsza’ omówiono niektóre sposoby radzenia sobie z tym problemem.
W drugiej połowie XIX wieku inżynierowie stanęli przed nowym wyzwaniem w związku z rosnącym zapotrzebowaniem na bardzo grube walcowane blachy potrzebne w przemyśle chemicznym i energetycznym. Blachy służyły do wykonania między innymi zbiorników sprężonego powietrza a do ich wywalcowania potrzebna była znaczna siła napędowa t.j. silniki o dużo większej mocy. Niezbędne było również zainstalowanie skrzyń przekładni.
Wprowadzenie układów hydraulicznych do walcarek stało się teraz koniecznością. Nie była to zupełnie nowa technologia gdyż siłowniki hydrauliczne były stosowane w procesach gięcia blach/walcowania już w XIX wieku, zatem były dostępne na rynku. Zaletą stosowania układów hydraulicznych jest możliwość użycia olbrzymiej siły napędu oraz pełna jej kontrola, poprzez kontrolowanie ciśnienia w siłownikach hydraulicznych. Dodatkowym atutem stosowania układów hydraulicznych jest możliwość natychmiastowego zatrzymania procesu walcowania.
Użycie układów hydraulicznych miało jeszcze jedną zaletę mianowicie pozwalało na ustawienie ciśnienia na określonym poziomie tak aby walcarka nie była nadmiernie obciążona i nie uległa uszkodzeniu podczas procesu gięcia. Ta cecha pozwalała na łatwiejsze operowanie maszyną i na lepszą kontrolę nad nią.
Wprowadzono łożyska stożkowe (toczne), które podobnie jak układy hydrauliczne miały już zastosowanie pod koniec XIX wieku, kiedy to Henry Timken, producent wagonów kolejowych z St Louis w USA, opatentował łożysko stożkowe w 1898 roku.
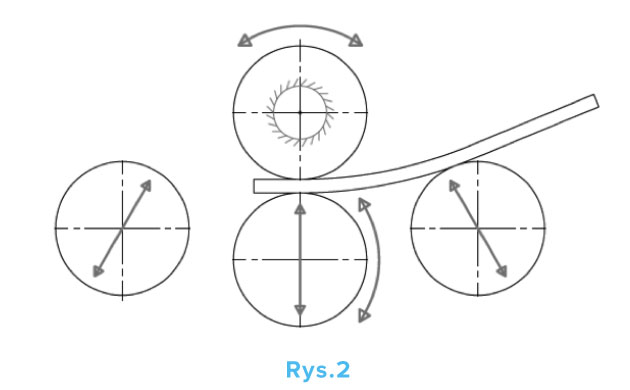
Pod koniec lat 50-tych XX wieku hydraulika była już powszechnie stosowana a w 1960 roku zaprojektowano walcarkę cztero-rolkową (kwarto-walcową) o dwóch punktach gięcia tak jak na Rys. 2
W tym samym czasie nastąpiła kolejna zmiana; obudowy większości walcarek były do tej pory robione z żeliwa, dzięki czemu maszyny były bardzo mocne jeżeli chodzi o gięcie blach ale mało odporne na uderzenia i przy ładowaniu. Walcarki z żeliwa były również trudne w naprawie gdy dochodziło do pęknięcia korpusu maszyny. Dlatego z czasem zastąpiono obudowy z żeliwa ramą z fabrykowanej stali. Ten proces dodatkowo został przyspieszony przez wprowadzenie w Europie Wschodniej w latach 60-tych XX wieku regulacji odnośnie zanieczyszczenia jakie powodowały odlewnie żeliwa.
Przeciętna odlewnia żeliwa była w stanie wykonać odlew obudowy w dwa dni robocze przy użyciu pracy dwóch pracowników, zakładając jednak że wykorzystano istniejącą formę odlewu. Nowe regulacje dotyczące zanieczyszczenia spowodowały jednak że proces ten stał się nierentowny bo wymagał instalacji drogich odciągów i filtrów. Dlatego od początku lat 60-tych XX wieku użycie fabrykowanej stali do produkcji obudowy maszyn stało się chlebem powszednim.
Wszystkie te zmiany przyczyniły się do rozwoju gięcia blach. Walce robocze były napędzane mechanicznie przy pomocy wałów napędowych, które przenosiły moment siły i obrotu.
Użycie cztero-rolkowej giętarki z dwoma punktami gięcia umożliwiło gięcie wstępne blachy i dogięcie obu końców blachy bez konieczności ściągania jej z walcarki i zmiany kierunku gięcia. Takie rozwiązanie było możliwe dzięki zamontowaniu w walcarce dodatkowego zewnętrznego walca.
Dalszy rozwój miał miejsce w latach 60-tych XX wieku wraz z użyciem silników hydraulicznych. Silnik hydrauliczny ma wysoki moment siły przy starcie a jego prędkość obrotową można łatwiej kontrolować poprzez zmianę objętości przepompowanej cieczy w pompie. W tym celu stosowano na przykład osiowe pompy tłokowe, które można zatrzymać w mgnieniu oka dostosowując objętość przepompowanej cieczy w pompie z maksymalnej prędkości na minutę do zera.
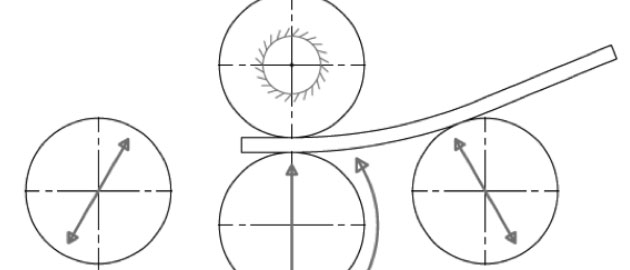
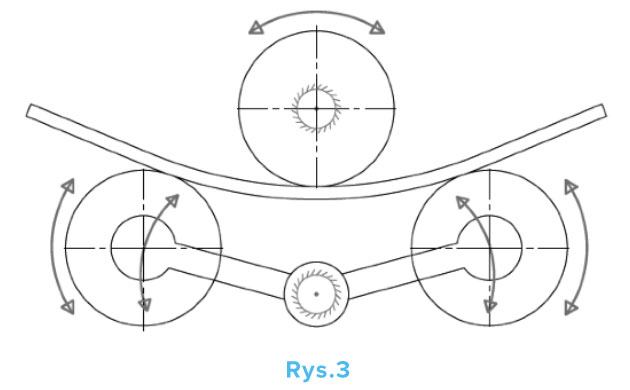
Pod koniec lat 60-tych XX wieku wynaleziono walcarkę trójwalcową (trójrolkową) o dwóch punktach gięcia. Taki układ walców wymagał użycia przekładni obiegowej planetarnej oraz zamontowania dwóch dolnych walców na mechanizmie z ruchomym ramieniem. Rolka centralna była zamocowana nieruchomo, podobnie jak koło dwóch przekładni planetarnych. Dzięki temu łatwiej było zamontować łańcuch przekładni do rolki centralnej. Tego typu przekładnie były zasilane przez silnik hydrauliczny o zmiennych prędkościach.
Podobnie jak w przypadku walcarek cztero-rolkowych (kwarto-walcowych) z dwoma punktami gięcia walcarki trój-rolkowe tego typu umożliwiały gięcie wstępne i doginanie bez konieczności ściągania blachy z walcarki i zmiany kierunku gięcia. Napęd na trzy walce oraz zmienna prędkość to kolejny krok w rozwoju walcarek. Tego typu rozwiązanie jest nadal stosowane przez wiele mniejszych i średnich przedsiębiorstw. Model znajduje się na Rys.3.
Przez okres 20 lat wykonanie walcarek zmieniło się z całkowicie mechanicznego napędu przekładni, z wykorzystaniem łożysk z fosfobrązu, w obudowie z żeliwa i z piramidowym układem walców do walcarek z cylindrami hydraulicznymi, ruchomymi walcami, trzymanymi w pozycji za pomocą łożysk tocznych i napędzanymi silnikiem hydraulicznym o zmiennych prędkościach.